|
I am a senior algorithm engineer at Continental, where I develop features for advanced driver assistance systems (ADAS). At Continental, I've worked on Blind Spot Detection, Emergency Brake Assist, and Trailer Merge Assist. I did my master's at the University of Sheffield funded by the CONACYT. I did my bachelor's at BUAP. |

|
|
These include coursework, side projects, and unpublished research work. |
|
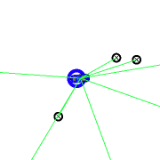
Self-Driving Car Engineer Nanodegree Program Mar. 14, 2021 course / code Implement a particle filter to localize a vehicle in a map. |
|
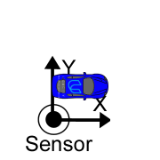
Self-Driving Car Engineer Nanodegree Program Feb. 21, 2021 course / code Integrate noisy LIDAR and RADAR measurements to estimate the state of a moving object. |

|
Self-Driving Car Engineer Nanodegree Program Feb. 11, 2021 course / code Train a deep neural network to drive a car autonomously. |
 
|
Self-Driving Car Engineer Nanodegree Program Jan. 24, 2021 course / code Train a convolutional neural network so it can classify traffic signs using the German Traffic Sign Dataset. |

|
Self-Driving Car Engineer Nanodegree Program Jan. 1, 2021 course / code This software pipeline identifies the lane boundaries in a video from a front-facing camera on a car. |
 
|
Motion Planning for Self-Driving Cars Oct. 20, 2020 course Develop a motion planner for an autonomous vehicle that can handle real-world scenarios. |
 
|
Visual Perception for Self-Driving Cars Aug. 17, 2020 course / code Given a sequence of images from a front-facing camera, you can estimate the trajectory of a self-driving car. |
|
State Estimation and Localization for Self-Driving Cars Jul. 24, 2020 course / code Combine IMU, GNSS, and LIDAR measurements to estimate the localization of a vehicle. |
 
|
Introduction to Self-Driving Cars Jun. 28, 2020 course You can control the vehicle's pedal and steering wheel to reach a desired speed and heading angle. |
|
|